





The robotic welding systems with TIG, PLASMA and MIG/MAG technology where the anthropomorphic robot performs welding on work pieces, moved through positioners at
one or more degrees of freedom managed by the control as external axes to allow coordinated movements with simple programming.
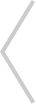
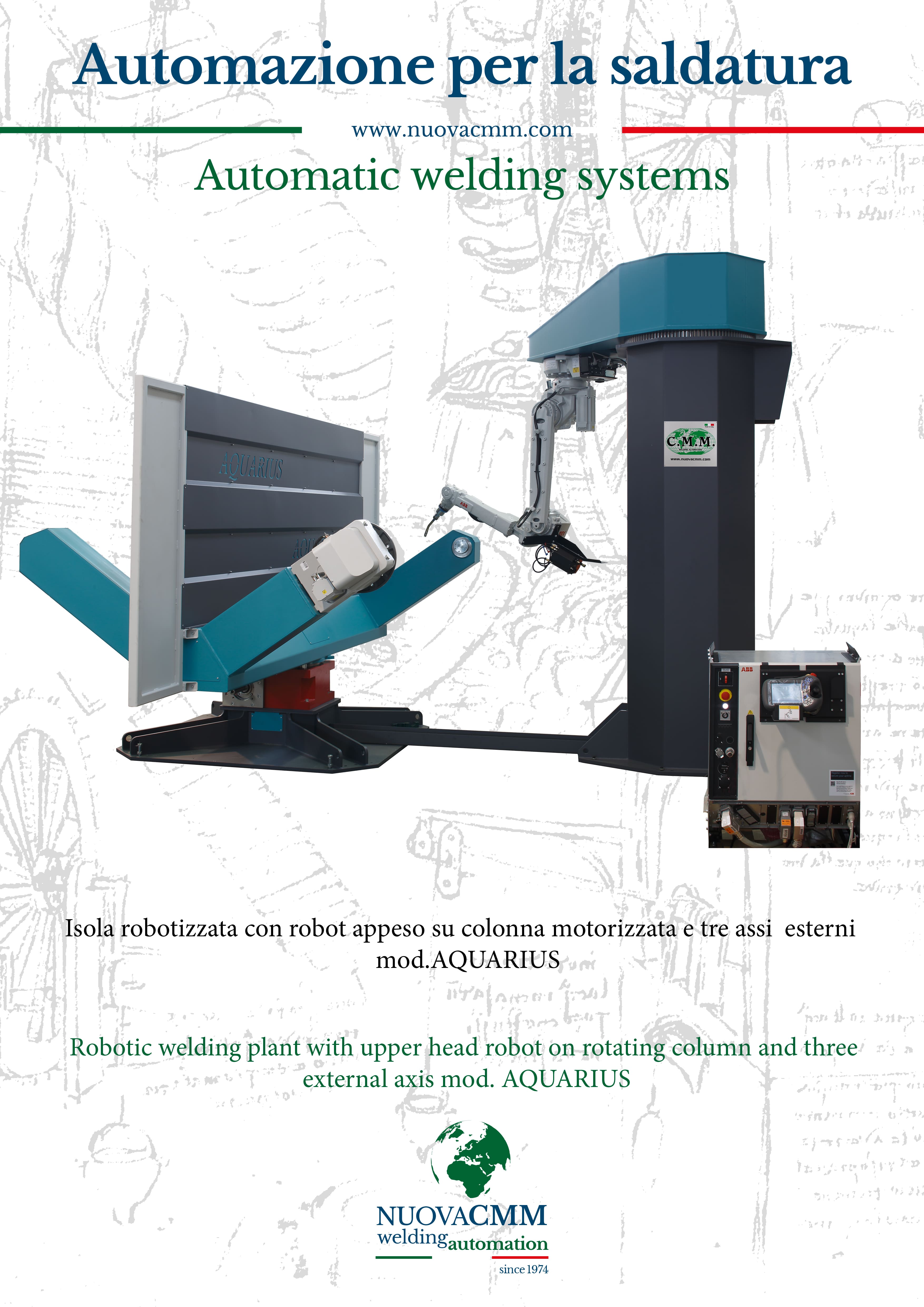
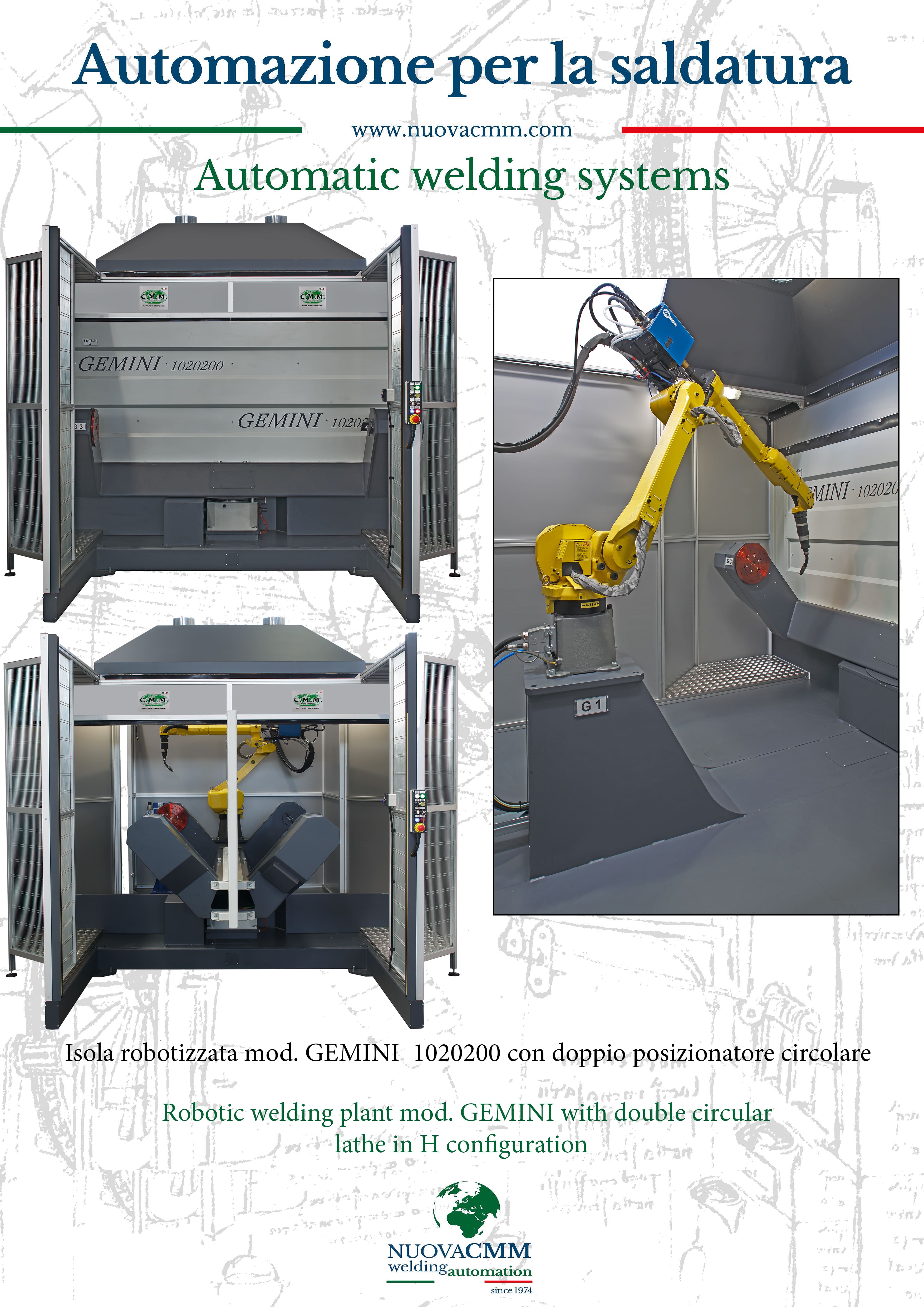
The geometric configuration of solution varies from the classic islands with single or double lathe positioners, to single or double orbital with fixed or mobile robot on ground or
area up to automatic production lines where the robot is only a component.